Multi-Sensor 3D Reconstruction
The project has been transformed into an invention patent and a paper (papers 1 SCI IF=2.798).
RGBD-camera-based VSLAM (Visual Simultaneous Localization and Mapping) algorithm is usually applied to assist robots with real-time mapping. However, due to the limited measuring principle, accuracy, and distance of the equipped camera, this algorithm has typical disadvantages in the large and dynamic scenes with complex lightings, such as poor mapping accuracy, easy loss of robot position, and much cost on computing resources.
Regarding to these issues, we proposes a new method of 3D interior construction, which combines laser radar and RGBD camera. Meanwhile, it is developed based on the Cartographer laser SLAM algorithm. The proposed method mainly takes two steps. The first step is to do the 3D reconstruction using Cartographer algorithm and RGBD camera. It firstly applies the Cartographer algorithm to calculate the pose of the RGBD camera and to generate a submap. Then, a real-time 3D point cloud generated by the RGBD camera is inserted into the submap, and the real-time interior construction is finished. The second step is to improve Cartographer loop-closure quality by the visual loop-closure for the sake of correcting the generated map.
Compared with traditional methods in large-scale indoor scenes, the proposed algorithm in our method shows higher precision, faster speed and stronger robustness in such contexts, especially with complex light and dynamic objects, respectively.
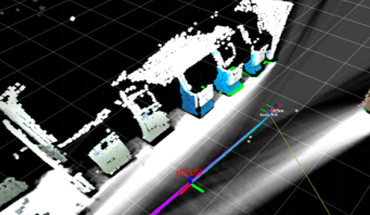
The results of the mapping experiment are shown in the figure below:
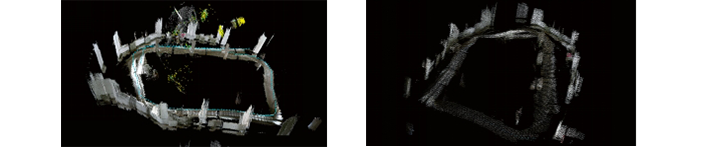
Figure RTAB.
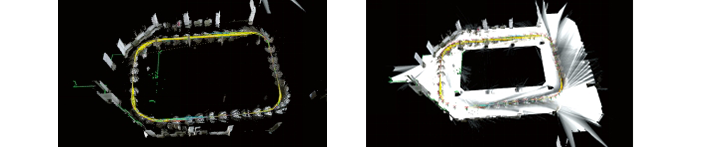
Figure Ours
Panlong Gu
Postgraduate Student of Control Engineering
My research interests include mobile robotics, Visual SLAM, 3D Target Detection and Tracking, Fusion of SLAM and target detection