Panlong Gu
Postgraduate Student of Control Engineering
Education
-
MEng in Control Engineering, 2019.09 - now
Shandong University
-
BSc in Measurement and control technology and instrument, 2015.09 - 2019.06
Qufu Normal University
Interests
- Robotics
- Visual SLAM (Visual Simultaneous Localization and Mapping)
- 3D Target Detection and Tracking
- Fusion of SLAM and target detection
Biography
Hi, I’m Panlong Gu (顾潘龙), a Master candidate of the School of Control Science and Engineering at Shandong University (山东大学控制科学与工程学院), Jinan, Shandong, China.
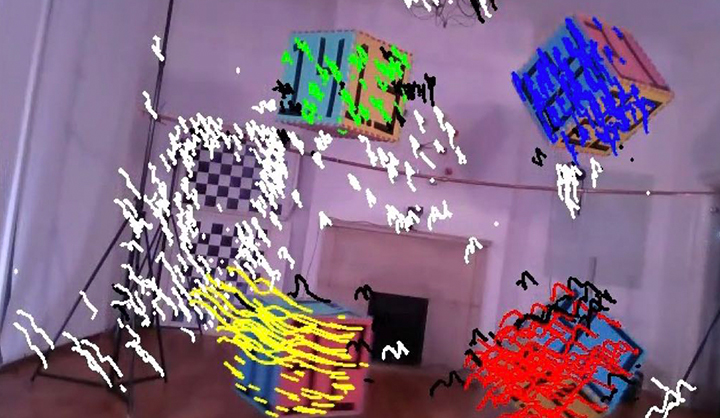
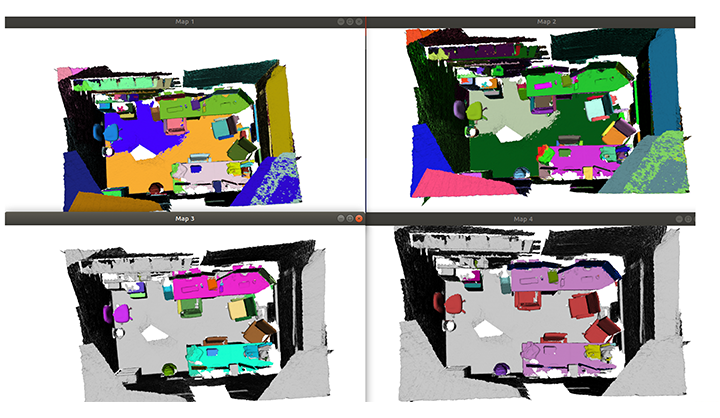
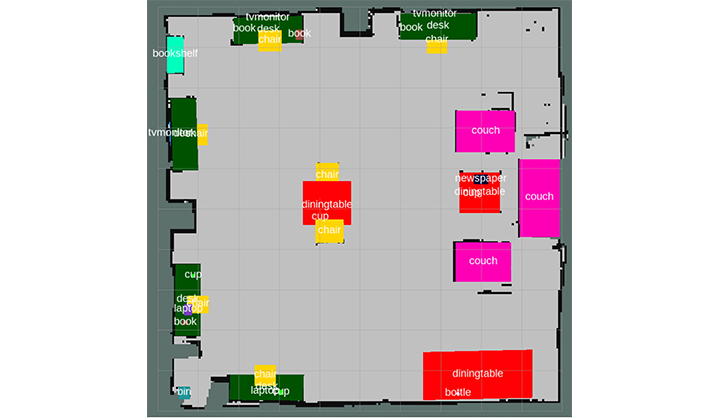
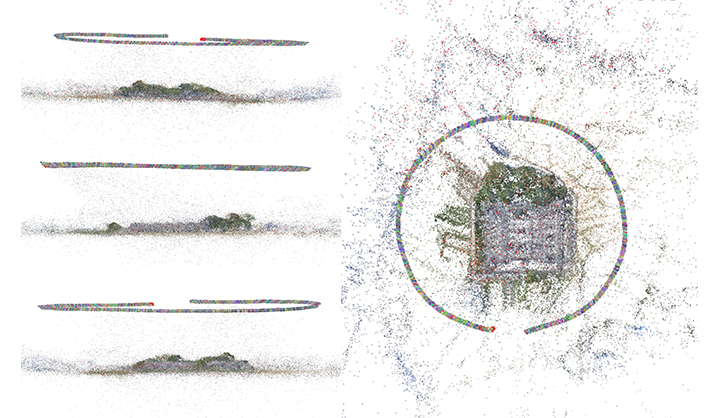
In the past postgraduate life, as a main research member, I participated in the research projects of the laboratory. In the national key research and development plan "service robot cloud service platform" project, I designed a trajectory instance segmentation method to extract all independent dynamic trajectories which are distributed in the observation space of the robot. Besides, in this project, I also researched and wrote the semantic lidar mapping algorithm and the 3D semantic mapping algorithm based on scene graph enhancement;
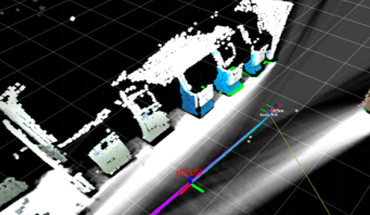
In the Shandong Province Major Science and Technology Innovation Project "The key technology research and industry of cloud-based home service robot practicalization". I conducted a study of the Cartographer and the RGBD fusion mapping method. I have completed the conversion of relevant invention patents and papers for the related achievements of the above projects.
At the same time, I have also participated in the writing of the laboratory project plane and have certain experience in project declaration. In addition, during my master’s and undergraduate years, I actively participated in various domestic and provincial competitions in related disciplines. I won two national first prizes, two national second prizes, two national third prizes, and provincial champions, 15 prizes in provincial and below competitions
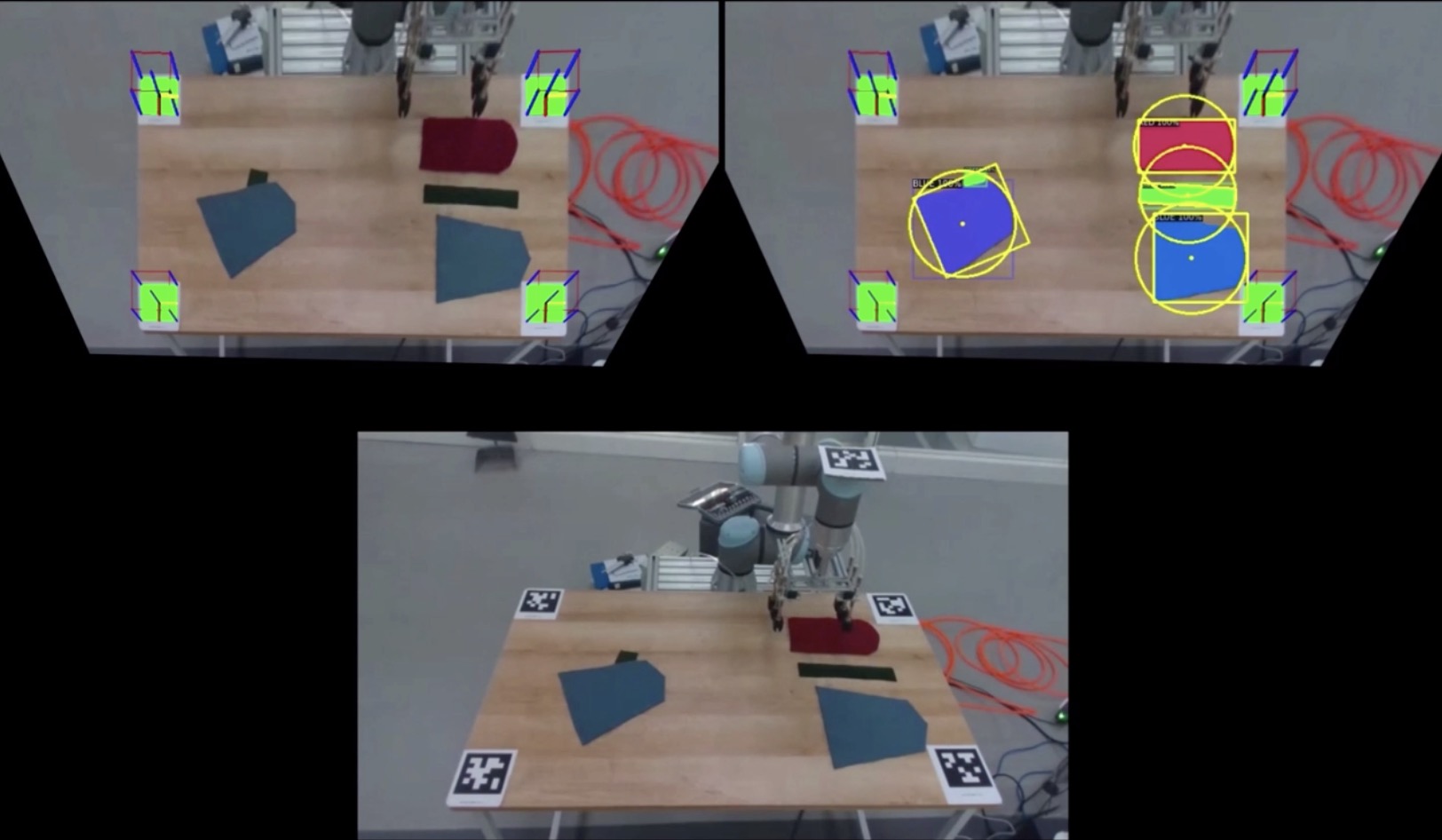
In the current research, I will focus on the mutual integration of SLAM and 3D target detection, and plan to introduce SLAM as an independent module into 3D target detection to improve the single reasoning ability of the recognition algorithm and the generalization ability of the model. Moreover, it can complete the camera SLAM process, and output the feature point map and camera trajectory with 3D Bounding Box annotations. At the same time, by relying on the feature point matching process in the SLAM algorithm, the tracking of the three-dimensional object can be completed with the lowest computational cost, and its pose information can be continuously optimized.